Here’s our latest paper for the Complex Adaptive System Composition and Design Environment project:
• John Baez, John Foley and Joe Moeller, Network models from Petri nets with catalysts, Compositionality 1 (2019), 4.
Check it out! And please report typos, mistakes, or anything you have trouble understanding! I’m happy to answer questions here.
The idea
Petri nets are a widely studied formalism for describing collections of entities of different types, and how they turn into other entities. I’ve written a lot about them here. Network models are a formalism for designing and tasking networks of agents, which our team invented for this project. Here we combine these ideas! This is worthwhile because while both formalisms involve networks, they serve a different function, and are in some sense complementary.
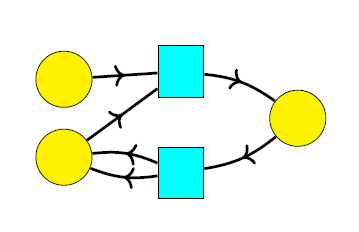
A Petri net can be drawn as a bipartite directed graph with vertices of two kinds: places, drawn as circles, and transitions drawn as squares:
When we run a Petri net, we start by placing a finite number of dots called tokens in each place:
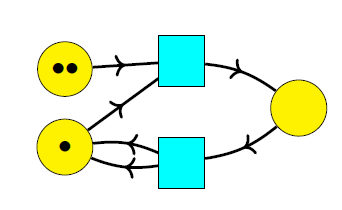
This is called a marking. Then we repeatedly change the marking using the transitions. For example, the above marking can change to this:

and then this:

Thus, the places represent different types of entity, and the transitions are ways that one collection of entities of specified types can turn into another such collection.
Network models serve a different function than Petri nets: they are a general tool for working with networks of many kinds. Mathematically a network model is a lax symmetric monoidal functor 








In many examples considered so far, 
• John Baez, John Foley, Joe Moeller and Blake Pollard, Network models.
Subsequently Joe introduced a more general noncommutative overlay operation:
• Joe Moeller, Noncommutative network models.
This lets us design networks where each agent has a limit on how many communication channels or commitments it can handle; the noncommutativity lets us take a ‘first come, first served’ approach to resolving conflicting commitments.
Here we take a different tack: we instead take 
This idea meshes well with Petri net theory, because any Petri net 



Given a Petri net, then, how do we construct a network model
For a Petri net, ‘catalysts’ are species that are neither increased nor decreased in number by any transition. For example, in the following Petri net, species 

but neither 



In Theorem 11 of our paper, we prove that given any Petri net

An object
From the functor 
• Joe Moeller and Christina Vasilakopoulou, Monoidal Grothendieck construction.
The tensor product in 

There are no morphisms between an object of 




The tensor product on 

This tensor product is a very cool thing. On the one hand it’s quite obvious: for example, if two people want to walk through a door, they can both do it, one at a time, because the door doesn’t get used up when someone walks through it. On the other hand, it’s mathematically interesting: it turns out to give, not a monoidal category, but something called a ‘premonoidal’ category. This concept, which we explain in our paper, was invented by John Power and Edmund Robinson for use in theoretical computer science.
The paper has lots of pictures involving jeeps and boats, which serve as catalysts to carry people first from a base to the shore and then from the shore to an island. I think these make it clear that the underlying ideas are quite commonsensical. But they need to be formalized to program them into a computer—and it’s nice that doing this brings in some classic themes in category theory!
The whole series of posts:
• Part 1. CASCADE: the Complex Adaptive System Composition and Design Environment.
• Part 2. Metron’s software for system design.
• Part 3. Operads: the basic idea.
• Part 4. Network operads: an easy example.
• Part 5. Algebras of network operads: some easy examples.
• Part 6. Network models.
• Part 7. Step-by-step compositional design and tasking using commitment networks.
• Part 8. Compositional tasking using category-valued network models.
• Part 9 – Network models from Petri nets with catalysts.
• Part 10 – Two papers reviewing the whole project.


I was wondering whether you were also working on the integration of Petri nets with signal flow graphs along the lines of your work with Erbele. Bonchi, Sobocinski and Zanasi have used props for both kinds of model, with different sets of generators and relations, but they haven’t looked at integration. This would be useful for me as an economist, because it would allow researchers to combine systems of differential equations modelling a macro-economy with a multi-sectoral approach to pricing and income distribution along the lines suggested by Ricardo, Marx, Leontieff, and Sraffa.
I’m very interested in integrating these things, and it’s great to hear you actually want that for practical reasons!
It may not be easy to follow, but my talk here describes the connection:
• John Baez, Props in network theory, Applied Category Theory 2018, May 4, 2018.
The category where morphisms are ‘open Petri nets’ is called RxNet in these slides, and the main category where morphisms are drawn as signal flow graphs is called LinRel. My student Jason Erbele and I have also studied the category SigFlow where morphisms are signal flow graphs. My talk slides contain links to papers on all these categories… but feel free to ask questions!